C2000ware Motor Control Sdk Work May 2026
When you ask, “How does the C2000WARE Motor Control SDK work?” the correct answer is: It works by bridging the gap between textbook control theory and silicon execution. It takes the Clarke/Park transforms, PI regulators, and space-vector modulation—concepts that require high-level mathematics—and compiles them into deterministic, low-latency code that runs on a real-time microcontroller.
// 3. Run speed PI loop (slower update) if(speedCtrlUpdateFlag) c2000ware motor control sdk work
__interrupt void motor1ISR(void)
In the world of real-time control, few applications demand as much precision, speed, and reliability as motor control. From spinning a drone’s propeller at 10,000 RPM to positioning a robotic joint with sub-degree accuracy, the underlying software must react to current, voltage, and position changes in microseconds. This is where Texas Instruments’ C2000™ real-time microcontrollers shine. When you ask, “How does the C2000WARE Motor
// 5. Apply inverse Park & SVPWM to write new PWM duty cycles MTR_updatePwmDutyCycles(&motorVars[0], pPwmData); few applications demand as much precision
// 1. Read analog currents and DC bus voltage HAL_readADCDriver(&halHandle, &adcData); // 2. Run FAST observer to estimate angle and speed FAST_run(fastHandle_handle, pAdcData, pPwmData, &estimate);


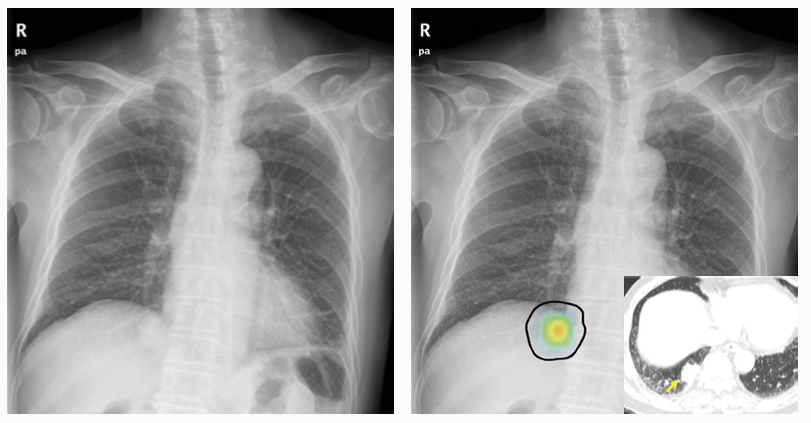 CASO 1: Câncer de pulmão localizado no lobo inferior direito.
CASO 1: Câncer de pulmão localizado no lobo inferior direito.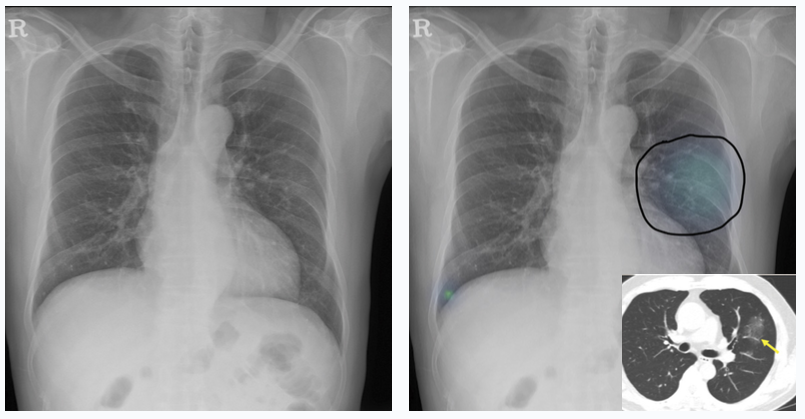 CASO 2: Pneumonia localizada na área do pulmão médio esquerdo.
CASO 2: Pneumonia localizada na área do pulmão médio esquerdo.